Cameras and sensors

Sensors are a special type of actor able to measure and stream data. All the
sensors have a listen method that registers the callback function that will
be called each time the sensor produces a new measurement. Sensors are typically
attached to vehicles and produce data either each simulation update, or when a
certain event is registered.
The following Python excerpt shows how you would typically attach a sensor to a vehicle, in this case we are adding a dashboard HD camera to a vehicle.
# Find the blueprint of the sensor.
blueprint = world.get_blueprint_library().find('sensor.camera.rgb')
# Modify the attributes of the blueprint to set image resolution and field of view.
blueprint.set_attribute('image_size_x', '1920')
blueprint.set_attribute('image_size_y', '1080')
blueprint.set_attribute('fov', '110')
# Set the time in seconds between sensor captures
blueprint.set_attribute('sensor_tick', '1.0')
# Provide the position of the sensor relative to the vehicle.
transform = carla.Transform(carla.Location(x=0.8, z=1.7))
# Tell the world to spawn the sensor, don't forget to attach it to your vehicle actor.
sensor = world.spawn_actor(blueprint, transform, attach_to=my_vehicle)
# Subscribe to the sensor stream by providing a callback function, this function is
# called each time a new image is generated by the sensor.
sensor.listen(lambda data: do_something(data))
Note that each sensor has a different set of attributes and produces different type of data. However, the data produced by a sensor comes always tagged with:
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
Most sensor data objects, like images and lidar measurements, have a function for saving the measurements to disk.
This is the list of sensors currently available
- sensor.camera.rgb
- sensor.camera.depth
- sensor.camera.semantic_segmentation
- sensor.lidar.ray_cast
- sensor.other.collision
- sensor.other.lane_invasion
- sensor.other.obstacle
Camera sensors use carla.colorConverter in order to convert the pixels of the original image.
sensor.camera.rgb

The "RGB" camera acts as a regular camera capturing images from the scene.
| Blueprint attribute | Type | Default | Description |
|---|---|---|---|
sensor_tick |
float | 0.0 | Seconds between sensor captures (ticks) |
image_size_x |
int | 800 | Image width in pixels |
image_size_y |
int | 600 | Image height in pixels |
fov |
float | 90.0 | Horizontal field of view in degrees |
enable_postprocess_effects |
bool | True | Whether the post-process effect in the scene affect the image |
gamma |
float | 2.2 | Target gamma value of the camera |
motion_blur_intensity |
float | 0.45 | Strength of motion blur. 1 is max and 0 is off |
motion_blur_max_distortion |
float | 0.35 | Max distortion caused by motion blur, in percent of the screen width, 0 is off |
motion_blur_min_object_screen_size |
float | 0.1 | Percentage of screen width objects must have for motion blur, lower value means less draw calls |
sensor_tick tells how fast we want the sensor to capture the data. A value of 1.5 means that we want the sensor to capture data each second and a half. By default a value of 0.0 means as fast as possible.
If enable_postprocess_effects is enabled, a set of post-process effects is
applied to the image to create a more realistic feel
- Vignette Darkens the border of the screen.
- Grain jitter Adds a bit of noise to the render.
- Bloom Intense lights burn the area around them.
- Auto exposure Modifies the image gamma to simulate the eye adaptation to darker or brighter areas.
- Lens flares Simulates the reflection of bright objects on the lens.
- Depth of field Blurs objects near or very far away of the camera.
This sensor produces carla.Image
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
width |
int | Image width in pixels |
height |
int | Image height in pixels |
fov |
float | Horizontal field of view in degrees |
raw_data |
bytes | Array of BGRA 32-bit pixels |
sensor.camera.depth
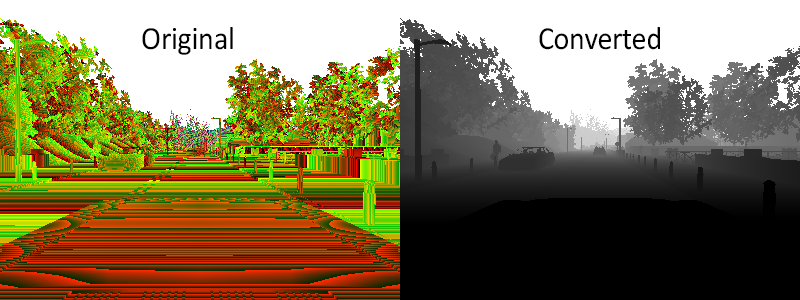
The "Depth" camera provides a view over the scene codifying the distance of each pixel to the camera (also known as depth buffer or z-buffer).
| Blueprint attribute | Type | Default | Description |
|---|---|---|---|
image_size_x |
int | 800 | Image width in pixels |
image_size_y |
int | 600 | Image height in pixels |
fov |
float | 90.0 | Horizontal field of view in degrees |
sensor_tick |
float | 0.0 | Seconds between sensor captures (ticks) |
This sensor produces carla.Image
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
width |
int | Image width in pixels |
height |
int | Image height in pixels |
fov |
float | Horizontal field of view in degrees |
raw_data |
bytes | Array of BGRA 32-bit pixels |
The image codifies the depth in 3 channels of the RGB color space, from less to more significant bytes: R -> G -> B. The actual distance in meters can be decoded with
normalized = (R + G * 256 + B * 256 * 256) / (256 * 256 * 256 - 1)
in_meters = 1000 * normalized
sensor.camera.semantic_segmentation
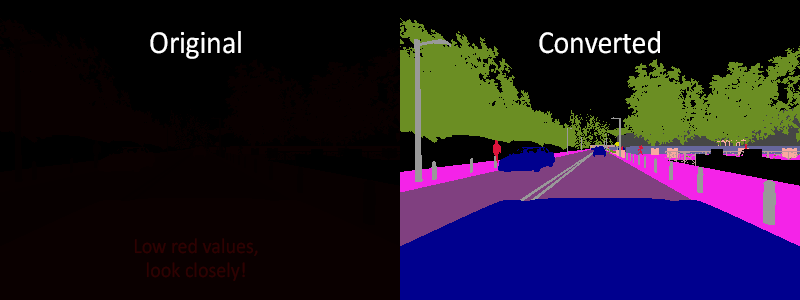
The "Semantic Segmentation" camera classifies every object in the view by displaying it in a different color according to the object class. E.g., pedestrians appear in a different color than vehicles.
| Blueprint attribute | Type | Default | Description |
|---|---|---|---|
image_size_x |
int | 800 | Image width in pixels |
image_size_y |
int | 600 | Image height in pixels |
fov |
float | 90.0 | Horizontal field of view in degrees |
sensor_tick |
float | 0.0 | Seconds between sensor captures (ticks) |
This sensor produces carla.Image
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
width |
int | Image width in pixels |
height |
int | Image height in pixels |
fov |
float | Horizontal field of view in degrees |
raw_data |
bytes | Array of BGRA 32-bit pixels |
The server provides an image with the tag information encoded in the red channel. A pixel with a red value of x displays an object with tag x. The following tags are currently available
| Value | Tag | Converted color |
|---|---|---|
| 0 | Unlabeled | ( 0, 0, 0) |
| 1 | Building | ( 70, 70, 70) |
| 2 | Fence | (190, 153, 153) |
| 3 | Other | (250, 170, 160) |
| 4 | Pedestrian | (220, 20, 60) |
| 5 | Pole | (153, 153, 153) |
| 6 | Road line | (157, 234, 50) |
| 7 | Road | (128, 64, 128) |
| 8 | Sidewalk | (244, 35, 232) |
| 9 | Vegetation | (107, 142, 35) |
| 10 | Car | ( 0, 0, 142) |
| 11 | Wall | (102, 102, 156) |
| 12 | Traffic sign | (220, 220, 0) |
This is implemented by tagging every object in the scene before hand (either at begin play or on spawn). The objects are classified by their relative file path in the project. E.g., every mesh stored in the "Unreal/CarlaUE4/Content/Static/Pedestrians" folder it's tagged as pedestrian.
Note
Adding new tags:
At the moment adding new tags is not very flexible and requires to modify
the C++ code. Add a new label to the ECityObjectLabel enum in "Tagger.h",
and its corresponding filepath check inside GetLabelByFolderName()
function in "Tagger.cpp".
sensor.lidar.ray_cast
This sensor simulates a rotating Lidar implemented using ray-casting. The points
are computed by adding a laser for each channel distributed in the vertical FOV,
then the rotation is simulated computing the horizontal angle that the Lidar
rotated this frame, and doing a ray-cast for each point that each laser was
supposed to generate this frame; points_per_second / (FPS * channels).
| Blueprint attribute | Type | Default | Description |
|---|---|---|---|
channels |
int | 32 | Number of lasers |
range |
float | 1000 | Maximum measurement distance in centimeters |
points_per_second |
int | 56000 | Points generated by all lasers per second |
rotation_frequency |
float | 10.0 | Lidar rotation frequency |
upper_fov |
float | 10.0 | Angle in degrees of the upper most laser |
lower_fov |
float | -30.0 | Angle in degrees of the lower most laser |
sensor_tick |
float | 0.0 | Seconds between sensor captures (ticks) |
This sensor produces
carla.LidarMeasurement
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
horizontal_angle |
float | Angle in XY plane of the lidar this frame (in degrees) |
channels |
int | Number of channels (lasers) of the lidar |
get_point_count(channel) |
int | Number of points per channel captured this frame |
raw_data |
bytes | Array of 32-bits floats (XYZ of each point) |
The object also acts as a Python list of carla.Location
for location in lidar_measurement:
print(location)
A Lidar measurement contains a packet with all the points generated during a
1/FPS interval. During this interval the physics is not updated so all the
points in a measurement reflect the same "static picture" of the scene.
Tip
Running the simulator at fixed time-step it is possible to tune the horizontal angle of each measurement. By adjusting the frame rate and the rotation frequency is possible, for instance, to get a 360 view each measurement.
sensor.other.collision
This sensor, when attached to an actor, it registers an event each time the actor collisions against something in the world. This sensor does not have any configurable attribute.
Note
This sensor creates "fake" actors when it collides with something that is not an actor, this is so we can retrieve the semantic tags of the object we hit.
This sensor produces a
carla.CollisionEvent
object for each collision registered
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
actor |
carla.Actor | Actor that measured the collision ("self" actor) |
other_actor |
carla.Actor | Actor against whom we collide |
normal_impulse |
carla.Vector3D | Normal impulse result of the collision |
Note that several collision events might be registered during a single simulation update.
sensor.other.lane_invasion
This sensor is a work in progress, currently very limited.
This sensor, when attached to an actor, it registers an event each time the actor crosses a lane marking. This sensor is somehow special as it works fully on the client-side. The lane invasion uses the road data of the active map to determine whether a vehicle is invading another lane. This information is based on the OpenDrive file provided by the map, therefore it is subject to the fidelity of the OpenDrive description. In some places there might be discrepancies between the lanes visible by the cameras and the lanes registered by this sensor.
This sensor does not have any configurable attribute.
This sensor produces a
carla.LaneInvasionEvent
object for each lane marking crossed by the actor
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
actor |
carla.Actor | Actor that invaded another lane ("self" actor) |
crossed_lane_markings |
carla.LaneMarking list | List of lane markings that have been crossed |
sensor.other.gnss
This sensor, when attached to an actor, reports its current gnss position. The gnss position is internally calculated by adding the metric position to an initial geo reference location defined within the OpenDRIVE map definition.
This sensor produces
carla.GnssEvent
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
frame |
int | Frame number when the measurement took place |
timestamp |
double | Timestamp of the measurement in simulation seconds since the beginning of the epispode |
transform |
carla.Transform | Transform in world coordinates of the sensor at the time of the measurement |
latitude |
double | Latitude position of the actor |
longitude |
double | Longitude position of the actor |
altitude |
double | Altitude of the actor |
sensor.other.obstacle
This sensor, when attached to an actor, reports if there is obstacles ahead.
Note
This sensor creates "fake" actors when it detects obstacles with something that is not an actor, this is so we can retrieve the semantic tags of the object we hit.
| Blueprint attribute | Type | Default | Description |
|---|---|---|---|
distance |
float | 5 | Distance to throw the trace to |
hit_radius |
float | 0.5 | Radius of the trace |
only_dynamics |
bool | false | If true, the trace will only look for dynamic objects |
debug_linetrace |
bool | false | If true, the trace will be visible |
sensor_tick |
float | 0.0 | Seconds between sensor captures (ticks) |
This sensor produces
carla.ObstacleDetectionEvent
objects.
| Sensor data attribute | Type | Description |
|---|---|---|
actor |
carla.Actor | Actor that detected the obstacle ("self" actor) |
other_actor |
carla.Actor | Actor detected as obstacle |
distance |
float | Distance from actor to other_actor |