3rd. Maps and navigation
After discussing about the world and its actors, it is time to put everything into place and understand the map and how do the actors navigate it.
The map
A map includes both the 3D model of a town and its road definition. Every map is based on an OpenDRIVE file describing the road layout fully annotated. The way the OpenDRIVE standard 1.4 defines roads, lanes, junctions, etc. is extremely important. It determines the possibilities of the API and the reasoning behind decisions made.
The Python API makes for a high level querying system to navigate these roads. It is constantly evolving to provide a wider set of tools.
Changing the map
To change the map, the world has to change too. Everything will be rebooted and created from scratch, besides the Unreal Editor itself. There are two ways to do so.
reload_world()creates a new instance of the world with the same map.load_world()changes the current map and creates a new world.
world = client.load_world('Town01')
The client can get a list of available maps. Each map has a name attribute that matches the name of the currently loaded city, e.g. Town01.
print(client.get_available_maps())
Landmarks
The traffic signs defined in the OpenDRIVE file are translated into CARLA as landmark objects that can be queried from the API. In order to facilitate their manipulation, there have been several additions to it.
- carla.Landmark objects represent the OpenDRIVE signals. The attributes and methods describe the landmark, and where it is effective.
- carla.LandmarkOrientation states the orientation of the landmark with regards of the road's geometry definition.
- carla.LandmarkType contains some common landmark types, to ease translation to OpenDRIVE types.
- A carla.Waypoint can get landmarks located a certain distance ahead of it. The type of landmark can be specified.
- The carla.Map retrieves sets of landmarks. It can return all the landmarks in the map, or those having an ID, type or group in common.
- The carla.World acts as intermediary between landmarks, and the carla.TrafficSign and carla.TrafficLight that embody them in the simulation.
my_waypoint.get_landmarks(200.0,True)
Lanes
The lane types defined by OpenDRIVE standard 1.4 are translated to the API in carla.LaneType as a series of enum values.
The lane markings surrounding a lane can be accessed through carla.LaneMarking. These are defined with a series of variables.
- carla.LaneMarkingType are enum values according to OpenDRIVE standards.
- carla.LaneMarkingColor are enum values to determine the color of the marking.
- width to state thickness of the marking.
- carla.LaneChange to state permissions to perform lane changes.
Waypoints use these to aknowledge traffic permissions.
# Get the lane type where the waypoint is.
lane_type = waypoint.lane_type
# Get the type of lane marking on the left.
left_lanemarking_type = waypoint.left_lane_marking.type()
# Get available lane changes for this waypoint.
lane_change = waypoint.lane_change
Junctions
A carla.Junction represents an OpenDRIVE junction. This class provides for a bounding box to state whereas lanes or vehicles are inside of it.
The most remarkable method of this class returns a pair of waypoints per lane inside the junction. Each pair is located at the starting and ending point of the junction boundaries.
waypoints_junc = my_junction.get_waypoints()
Waypoints
A carla.Waypoint is a 3D-directed point. These are prepared to mediate between the world and the openDRIVE definition of the road. Everything related with waypoints happens on the client-side, so there no communication with the server is needed.
Each waypoint contains a carla.Transform. This states its location on the map and the orientation of the lane containing it. The variables road_id,section_id,lane_id and s translate this transform to the OpenDRIVE road. These combined, create the id of the waypoint.
Note
Due to granularity, waypoints closer than 2cm within the same road share the same id.
A waypoint also contains some information regarding the lane containing it. Specifically its left and right lane markings, and a boolean to determine if it is inside a junction.
# Examples of a waypoint accessing to lane information
inside_junction = waypoint.is_junction()
width = waypoint.lane_width
right_lm_color = waypoint.right_lane_marking.color
Navigation in CARLA
Navigation in CARLA is managed via the waypoint API. This consists of a summary of methods in carla.Waypoint and carla.Map.
All the queries happen on the client-side. The client only communicates with the server when retrieving the map object that will be used for the queries. There is no need to retrieve the map (world.get_map()) more than once.
Navigating through waypoints
Waypoints have a set of methods to connect with others and create a road flow. All of these methods follow traffic rules to determine only places where the vehicle can go.
next(d)creates a list of waypoints at an approximate distancedin the direction of the lane. The list contains one waypoint for each deviation possible.previous(d)creates a list of waypoints waypoint at an approximate distancedon the opposite direction of the lane. The list contains one waypoint for each deviation possible.next_until_lane_end(d)andprevious_until_lane_start(d)returns a list of waypoints a distancedapart. The list goes from the current waypoint to the end and start of its lane, respectively.get_right_lane()andget_left_lane()return the equivalent waypoint in an adjacent lane, if any. A lane change maneuver can be made by finding the next waypoint to the one on its right/left lane, and moving to it.
# Disable physics, in this example the vehicle is teleported.
vehicle.set_simulate_physics(False)
while True:
# Find next waypoint 2 meters ahead.
waypoint = random.choice(waypoint.next(2.0))
# Teleport the vehicle.
vehicle.set_transform(waypoint.transform)
Generating a map navigation
The instance of the map is provided by the world. It will be useful to create routes and make vehicles roam around the city and reach goal destinations.
The following method asks the server for the XODR map file, and parses it to a carla.Map object. It only needs to be calle once. Maps can be quite heavy, and successive calls are unnecessary and expensive.
map = world.get_map()
- Get recommended spawn points for vehicles pointed by developers. There is no ensurance that these spots will be free.
spawn_points = world.get_map().get_spawn_points()
- Get the closest waypoint to a specific location or to a certain
road_id,lane_idandsin OpenDRIVE.
# Nearest waypoint on the center of a Driving or Sidewalk lane.
waypoint01 = map.get_waypoint(vehicle.get_location(),project_to_road=True, lane_type=(carla.LaneType.Driving | carla.LaneType.Sidewalk))
#Nearest waypoint but specifying OpenDRIVE parameters.
waypoint02 = map.get_waypoint_xodr(road_id,lane_id,s)
- Generate a collection of waypoints to visualize the city lanes. Creates waypoints all over the map, for every road and lane. All of them will be an approximate distance apart.
waypoint_list = map.generate_waypoints(2.0)
- Generate road topology. Returns a list of pairs (tuples) of waypoints. For each pair, the first element connects with the second one and both define the starting and ending point of each lane in the map.
waypoint_tuple_list = map.get_topology()
- Convert simulation point to geographical coordinates. Transforms a certain location to a carla.GeoLocation with latitude and longitude values.
my_geolocation = map.transform_to_geolocation(vehicle.transform)
- Save road information. Converts the road information to OpenDRIVE format, and saves it to disk.
info_map = map.to_opendrive()
CARLA maps
So far there are seven different maps available. Each one has unique features and is useful for different purposes. Hereunder is a brief sum up on them.
Note
Users can customize a map or even create a new map to be used in CARLA.
| Town | Summary |
|---|---|
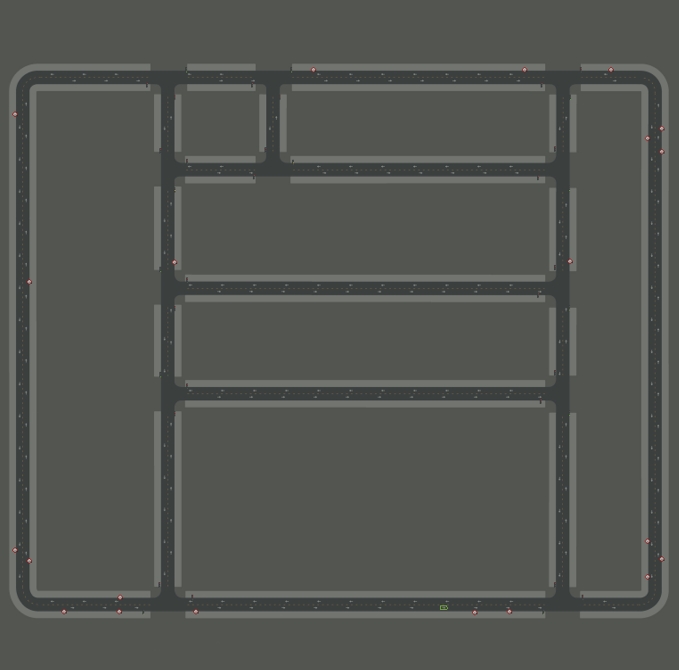
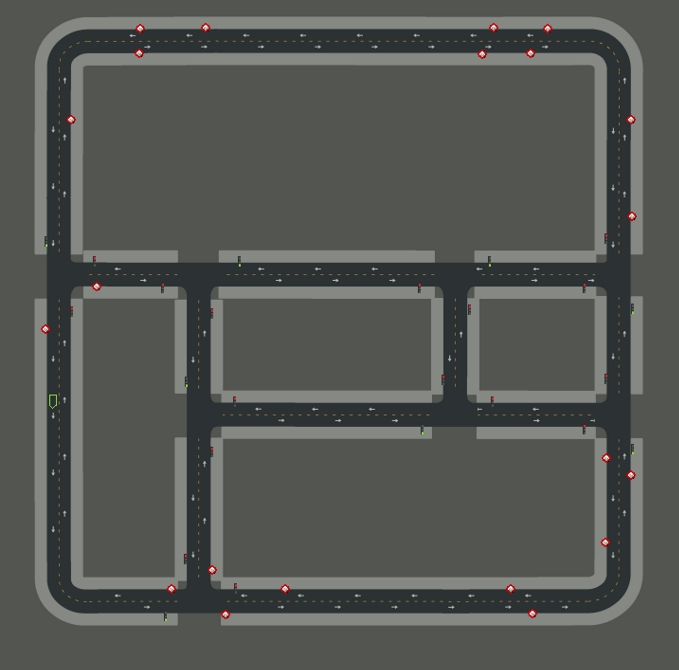
| Town01 | A basic town layout with all "T junctions". |
| Town02 | Similar to Town01, but smaller. |
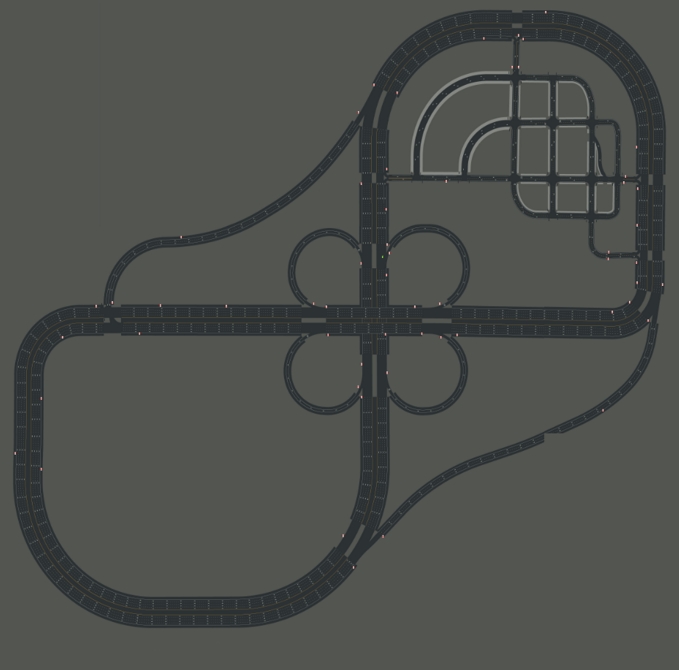
| Town03 | The most complex town, with a 5-lane junction, a roundabout, unevenness, a tunnel, and much more. Essentially a medley. |
| Town04 | An infinite loop with a highway and a small town. |
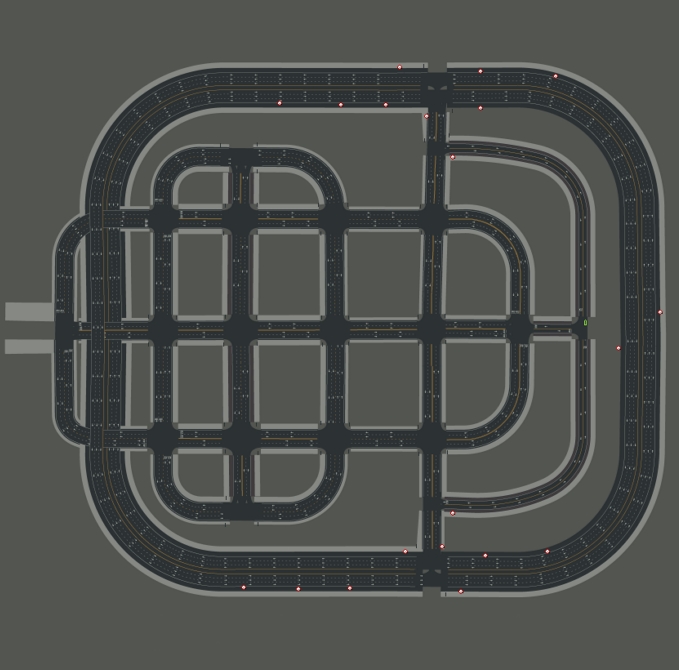
| Town05 | Squared-grid town with cross junctions and a bridge. It has multiple lanes per direction. Useful to perform lane changes. |
| Town06 | Long highways with many highway entrances and exits. It also has a Michigan left. |
| Town07 | A rural environment with narrow roads, barely non traffic lights and barns. |
| Town10 | A city environment with with different environments such as an avenue or a promenade, and more realistic textures. |
 Above: Town01
Above: Town01
 Above: Town02
Above: Town02
 Above: Town03
Above: Town03
 Above: Town04
Above: Town04
 Above: Town05
Above: Town05
 Above: Town06
Above: Town06
 Above: Town07
Above: Town07
 Above: Town10
Above: Town10
That is a wrap as regarding maps and navigation in CARLA. The next step takes a closer look into sensors types, and the data they retrieve.
Keep reading to learn more or visit the forum to post any doubts or suggestions that have come to mind during this reading.